Title: USE OF AUTOMATED GUIDE VEHICLE (LINE FOLLOWER ROBOT) IN MATERIAL SUPPLY DELIVERY WITHIN HOSPITALS
Authors: Tejaswi Kasarla & Aravind Reddy Keesara, 3 Year BTech, EEE
College: Mahatma Gandhi Institute of Technology, Gandipet
ABSTRACT:
This paper report describes the techniques for analyzing, designing, controlling and improving the material supply delivery within hospitals. Due to increasing demands for patient supervision, the jobs like supply of food, medicines etc., has become a time consuming process. So, a microcontroller based line following robot carrying medicine can be designed for providing the medicine to the patient whenever they need it. A line follower robot is an electronic system that can detect and follow a line drawn on the floor. The robot uses IR sensors to sense the line, an array of 8 IR LEDs and sensors, facing the ground has been used in this setup. An IR sensor can be fitted near the patient’s bed to which connection has been made with the robot too. The switch for it can be activated by the supply person in the microcontroller itself. If the switch is pressed then a flag bit is set in the microcontroller, from which the robot follows the line and reaches near the patient and provide the medicine to the patient. A proximity sensor can be attached with the robot so that it detects any obstacle present in their way and can alarm. The ability to get someone around the clock is the best thing that this system can do. This helps and simplifies the job of material supply and also reduces the manual routine work done by the hospital staff. This technology focuses on the delivery of safe, timely, efficient, effective, patient-centered health care.
INTRODUCTION:
A health system [7], also referred to as health care system is the organization of people, institutions, and resources to deliver health care services to meet the health needs of target populations.
This health care system also includes the hospitals, health care institution or clinics. These are operated by government, private for profit organization and also private not for profit organizations. All around the world, many patients suffers because of to pay medical practitioners taken by the health care system [5]. This health care system includes the health care staff personnel that are doctors, nurse, security guards, sweepers and many more.
The fee for the medical practitioners depends on the service, medicine, capitation and the salary of the personnel. And also it is very difficult to continuous monitoring of the patients. The line following robot can be very efficient to continuous monitoring to the patients, whenever they need any help or medicine. That robot based health care management system can reduce the fee for the patients so that they can easily pay that amount of money. [5]
PROBLEM IDENTIFICATION:
Research shows that number of patients died because of few numbers of trained medical staff [10].Shortage of nurses is ‘killing thousands a year’: Patients in overstretched hospitals developing fatal complications which could have been cured [11]. A lot of hospitals have stopped recruiting nurses and medical personnel since 2005 and 2006. From the past two years there is an increasing trend of recruiting more doctors than the nurses. If sufficient number of nurses based on the patient numbers visiting a hospital can be recruited then the number of deaths can be estimated decreases by 10 % [11].
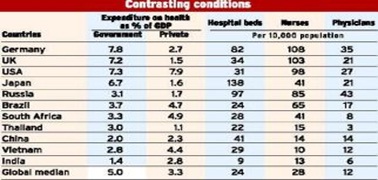
Figure 1: WORLD HEALTH STATISTICS, WHO 2013[16]
The above table (fig1) shows that the availability of nurses and physicians is very low in India compared to that of the Global median. So there is a high need of supervision of the nurses or attendants towards the monitoring of patients rather than concentrating on the supply of medicines, food etc. This leads to the need for implementing other alternative for those activities. This is the situation where the Automated Guided Vehicle (AGV) can be implemented for the delivery of the material supply to patients. In this paper we considered the use of a line follower robot for the above specified problem.
RECOMMENDED SOLUTION (STATING THE BENEFITS):
Automation is recommended in the material supply delivery system. The benefits [5] of using the automation techniques in hospitals are as follows:
- The average nurse walks roughly 5 miles per shift of work. Much of this travel time is not spent travelling from one patient to the next to apply hands-on, bedside care. Unfortunately, most of the walking is spent in the pursuit of hunting for and gathering medical supplies, collecting and executing physician orders, and performing registration and discharge tasks. These routine and mundane tasks can be performed by robots now. Thanks to the robot solution, quality of care improves through efficiency.
- Nurses can now claim more time during their shift to spend on patient care. In fact, the robot allows for a redefinition of ‘patient care.’ Whereas historically, gathering supplies, coordinating meals and medications, and various forms of paperwork and documentation were considered ‘patient care’, now these administrative and logistical tasks can be defined and assigned to what they truly are. And nurses can get back to the highly-skilled interpersonal clinical tasks that they have been trained for, and that patients really need in order to heal. Quality of care improves through increased staff satisfaction.
- Medical errors have been a major cost to the healthcare delivery system. First and foremost, there is a human cost. Medical errors have caused death, dismemberment, and minor injuries. Some of the factors contributing to medical errors includes over-worked and exhausted staff, longer shifts, and increasing amounts of tasks to be performed. All of these, in human beings, contribute to mistakes. If robots can take away the routine tasks, and clinicians and support staff can reclaim more focus on tasks and responsibilities that have a more direct impact on patient care, medical errors should decrease. Quality of care improves through reduced medical errors.
The government bodies try to implement various strategies to increase the potency of the health care system in the countries [3]
OVERVIEW OF LINE FOLLOWER ROBOT SYSTEM:
This smart and intelligent Line following robot based materials supply system has divides in several parts- sensing, comparator, motor driver and actuators. The robot uses IR sensors to sense the line, an array of 8 IR LEDs(Tx) and sensors(Rx), facing the ground has been used in this setup.
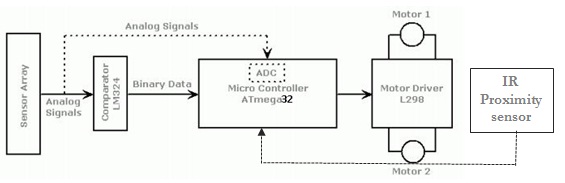
Figure2: Block Diagram Of Line Follower Circuit
The output of the sensors is an analog signal which depends on the amount of light reflected back, this analog signal is given to the comparator to produce 0s and 1s which are then fed to the microcontroller [15]. Comparator circuit is used for set a threshold value from which it can set logic when it detects the light. Motor driver is use for controlling the motor. And actuator is use for make the system dynamic. IR proximity sensor used for stop the robot when any object came to it path, giving off an alarm. The motor again starts when the obstacle isn’t avoiding its path. The microcontroller decides the next move according to the algorithm given below which tries to position the robot such that L1 and R1 both read 0 and the rest read 1.
ALGORITHM:
The algorithm is developed keeping in mind the following rules[12][13]:
- At any intersection, if there exists a forward path, then the robot should take that path and if it doesn’t exist, then the robot is free to choose any path.
- If there is any discontinuity in the line, then the robot has to move forward until it detects the line.
- There will not be any dead ends in the track.
Given below are three steps which is repeatedly executed when the robot moves over the line.
1. L= leftmost sensor which reads 0; R= rightmost sensor which reads 0.
If no sensor on Left (or Right) is 0 then L (or R) equals 0;
2. If all sensors read 1 go to step 3,
Else,
If L>R Move Left
If L<R Move Right
If L=R Move Forward
Go to step 4
3. Move Clockwise if line was last seen on Right
Move counter clockwise if line was last seen on Left
Repeat step 3 till line is found.
4. Go to step 1.
IMPLEMENTATION:

Figure3: Patient rooms with line drawing on floors Figure4: IR sensor circuit
A. SENSORS
This system uses IR emitters (Tx) and IR receivers (Rx) for purpose of both line detection and also in obstacle sensing.[8][9](fig4)
An Infra-Red sensor detects Infra-Red light/white light from a particular object/line and then converts light energy to electrical energy. An IR sensor pair consists of an emitter and a detector. The emitter is blue in color and the detector can be grey, black or white in color.
IR Emitter: An infra-red emitter is a Light Emitting Diode (LED) made from Gallium Arsenide. It detects IR energy at a wavelength of 880nm and emits the same.
IR Detector: An infra-red detector is a photo detector. It detects IR energy emitted by the emitter and converts it into electrical energy.
B. VOLTAGE REGULATOR – IC7805:
It converts the given input voltage to an output voltage of 5 volts [14] (Input voltage > 5 volts).

Figure5: Voltage Comparator
It has three terminals namely:
1. Input voltage terminal
2. Ground (negative terminal of DC Voltage Source)
3. Output voltage terminal
A voltage of 5 volts is required to activate any IC (Vcc).
C. COMPARATOR:
Comparator is a device that compares two voltages or currents and outputs a digital signal indicating which is larger. It usually compares the voltages between the inverting and non-inverting terminals. A threshold voltage is set on the reference voltage in the operational amplifier in inverting or non-inverting terminal. If another terminal voltage that is input voltage is greater than this threshold voltage then it gives the output. And if the input voltage is less then threshold voltage then it cannot gives any output. The sensitivity of the sensor can be varying by set a threshold voltage in the comparator circuit. By using this circuit an IR sensor can be used for low beam of light and an IR proximity sensor for detect the obstacle from a large distance.
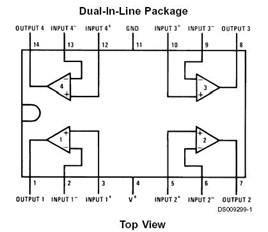
Figure 6: Block diagram of LM324 comparator
D. MOTOR DRIVER:
Motor driver act like the current amplifier. It is use for controlling the current in the motor. The motor drive provides high current as the dc motor need when it receives low current in the circuit. For drive the motors a high value of the current is needed. This module is based on the very popular L298 Dual H-Bridge Motor Driver Integrated Circuit (fig7). The circuit will allow you to easily and independently control two motors of up to 2A each in both directions and one stepper motor.
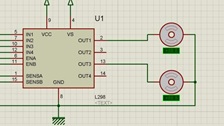
Figure7: Motor driver IC: L298
E. ACTUATORS (MOTORS AND WHEELS) :
For the proper movement of the system two dc motors has been used in the circuit and a castor wheel is attached in the front side of that Line Following Robot. Caster wheel enable the movement of the robot is easy in every direction. Two dc motors at the end side of the robot is controlled by the motor driver. For controlling the complete system a microcontroller is used, which set its flag bit as per the different situations. And this complete system need a small power supply of 9 V, which can be provided form a battery. That is why this system is cost effective and operates in very low power supply.
EXPERIMENTAL RESULTS:

Figure 8: Line follower testing
Marking a few checkpoints and placing the IR sensors at these checkpoint and introducing flag bits in microcontroller for specified location (destination node), the robot was observed to reach the marked location without any problems (fig8).
When the system detects any obstacle in its path then the dc motor stop rotating and a buzzer is activated with the help of microcontroller unit.
The presently used prototype is able to carry a load of 250g. By using the motors of higher rating payload is expected to increase.
FUTURE SCOPE:
Line following robot based materials supply system can play a vital role in the field of hospitality. Line following robot’s application over electronics engineering can’t be underestimated. In India many people show reluctance to get admitted in a hospital because of cost issues. The cost for cure can be reduced by using the robots in government and private hospitals. It can be very beneficial for the patients as well. Also, monitoring of every patient is very difficult for the nurses, given the fact that there are very few of them. So a camera can be placed in the line following robot, from which the status for every patients can be handle from a single room. In the bed of the patient an accelerometer can be placed from which if a patient have a heart attack then that device can operate an alarm circuit. A GSM module can be placed with the line following robot so that if any untoward incident occurs then that system can make a call to the doctor, it also helps the doctors for remote diagnosis of patients even when he is away from hospital by remote presence. The line follower robots can also be improvised by using RFID tags so that accuracy of the system increases. Robotics is very big field for the new innovation and research. By using the robot in real time applications, a health care system can be manage in an effectively way.
CONCLUSION:
The cost of health care in India greatly depends upon the land and location of building, the infrastructure and facilities and skilled staff required to maintain the expensive machinery. In a country like India, where the population in humongous and the resources are scarce, it becomes highly difficult to set up such extensive projects in every location. So what this system provides is an alternate to the existing system with robotic machinery, which can handle tasks with lower per capita cost and better accuracy
REFERENCES:
[1] Bajestani, S.E.M., Vosoughinia, A., “Technical Report of Building a Line Follower Robot” International Conference on Electronics and Information Engineering (ICEIE 2010), vol 1, pp v1-1 v1-5, 2010.
[2] Bong. D.M.K, “Automatic Guided Vehicle System” in Department of Electrical Engineering, University Tenega Nasional, Malaysia, P.41, 2004.
[3] Colak, I., Yildirim, D.,”Evolving a Line Following Robot to use in shopping centers for entertainment”,Industrial Electronics, 2009. IECON ’09. 35th Annual Conference of IEEE,pp.3803 – 3807,3-5 Nov. 2009.
[4] Development and Applications of Line Following Robot Based Health Care Management System Deepak Punetha, Neeraj Kumar, Vartika Mehta, International Journal of Advanced Research in Computer Engineering & Technology (IJARCET), Volume 2, Issue 8, August 2013 p2446-2450
[5] Health Care System – Liverpool-ha.org.uk. Retrieved 2011-08-06.
[6] Hospital Logistics in the Age of Robotics, Why Hospitals Should Hire More Robots: http://medicalsupplies.about.com/od/Budgeting/a/Hospital-Logistics-In-The-Age-Of-Robotics.htm
[7] http://en.wikipedia.org/wiki/Health_system.
[8] K.A.Unyelioglu, C.Hatipoglu, and U.Ozguner, “Design and analysis of a line following robot controller”, IEEE Trans. Control System Technol., Vol.5, no.1, pp.127-134, 1997 (Pubitemid 127770536)
[9] M.Mehdi Samaatiyan, Mehran Pakdaman “Design and implementation of line follower robot”, Mazandaran Institute of Technology, Iran, 2009, Second International Conference on Computers and Electrical Engineering.
[10] Nursing shortage Statistic from around the world, Available: http://www.dailymail.co.uk/health/article-2266158/Shortage-nurses-killing-thousands-patients-year-Patients-likely-develop-complications-properly-monitored.html.
[11] Patient Statistics from around the world, Available: http://www.standard.co.uk/news/health/thousands-may-have-died-needlessly-at-nhs-hospitals-shamed-in-report-8711159.html
[12] Priyank Patil, “AVR Line Following Robot,” Department of Information Technology K. J. Somaiya College of Engineering Mumbai, India. Retrieved Mar 5, 2010.
[13] Robot- Line Follower by Mithun.S: http://www.instructables.com/id/Robot-Line Follower/?ALLSTEPS
[14] S.Akash Bibek Kabi, S.Karthick, “Implementing a Line Tracking Robot as an effective Sensors and Closed loop system”, SRM University, Chennai India, International Journal of Recent Trends in Engineering, November 2009.
[15] Tim Wilmshurst, 2008, Designing Embedded Systems with PIC Microcontrollers: Principles and Applications, Second edition. 48p.
[16] World Health Statistics presents, “Global Health Observatory (GHO)”, the most recent health statistics for WHO’s 193 Member States, 2013.